 Albert HUBO
Albert HUBO
Albert HUBO is a robot modeled after Albert Einstein. This intelligent humanoid can use 30 facial expressions to help it communicate with humans. He even understands words. Albert HUBO can move at 1.25 Kilometer per hour and runs on Window XP.
 Alice
Alice
Dancing robot Alice is one of Dancing Doll-RZ's creations. She does not always have great moves but her performance is fluid and smooth. Alice can also play instruments such as the violin. She has 25 microcontrollers and can be controlled with a wireless…
 Amio
Amio
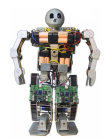
Amio is a complex humanoid robot developed by KAIST. It can make decisions and display expressions based on data it acquires through its communication model. Amio can perform simple tasks such as assembly line work and household chores, and can walk 1…
Min Su Kim of Hong IK University developed a humanoid called DONA. It asks for donations from passers-by by being polite and performing different kinds of preprogrammed gestures.
 HanSaRam VII
HanSaRam VII
KAIST developed the seventh robot in the HanSaRam series called HanSaRam VII. It has five fingers in each hand, can grasp and release objects, and can express hand gestures.
 HanSaRam VI
HanSaRam VI
KAIST developed the sixth robot in the HanSaRam series called HanSaRam VI. It generates walking pace through 3D linear inverted pendulum mode, which makes easy to control motions.
 HanSaRam V
HanSaRam V
KAIST developed the fifth robot in the HanSaRam series called HanSaRam V. With independent locomotion, sensing and processing, it can walk in patterns avoiding obstacles.
 HanSaRam III
HanSaRam III
KAIST developed the third robot in the HanSaRam series called HanSaRam III. It has 22 DOFs and a camera for visual feedback, and can grasp objects with its claw-like hands.
 HanSaRam IV
HanSaRam IV
KAIST developed the fourth robot in the HanSaRam series called HanSaRam IV. It has 12 servomotors, 4 force sensing resistors in each foot, and master-slave controllers.
 HanSaRam II
HanSaRam II
KAIST developed the second robot in the HanSaRam series called HanSaRam II. This bipedal walking robot has the shape of a human body with different upper and lowers parts.
 HanSaRam I
HanSaRam I
KAIST developed the first robot in the HanSaRam series called HanSaRam I. This bipedal robot was created to test the walking algorithm and control method of lightweight robots.
 HUBO KHR-3
HUBO KHR-3
KAIST developed the third robot in the HUBO series called HUBO KHR-3. It is a prototype humanoid which can play rock-paper-scissors because of independent motion of its fingers.
 HUBO FX-1
HUBO FX-1
Korea Advanced Institute of Science and Technology developed a chair shaped robot called HUBO FX-1. Running on Windows XP, and having a range of sensors, it can carry around a human.
 HUBO Jaemi (HUBO 2)
HUBO Jaemi (HUBO 2)
KAIST developed the second robot in the HUBO series called Jaemi HUBO 2. This humanoid can run and walk at a high speed, and its arms have a quick and natural motion.
 Joy
Joy
House steward robot Joy acts as the human/machine interface inside intelligent homes. It has a planning algorithm system so it can complete tasks with minimal human input needed. Joy also can grasp objects with grippers on its arms and bring them to its…
 KAMERO
KAMERO
KaMERo is a mobile robot with three leg-wheels. This wheeled robot is able to move in three different ways thanks in part to a 90 degree bendable knee joint in each leg. The rear leg is an active wheel, and the other two are passive and to give it stability.…
 KHR 2
KHR 2
The KHR-2, like its predecessor the KHR-1, is an action bipedal robot. It can perform powerful kicks and kung-fu, and responds immediately to commands. High-performance servos and real time master/slave control gives it expanded programmability and improved…
 KHR 1
KHR 1
KHR-1 is a programmable humanoid robot, also known as the ECO-ROBOT. It is capable of performing human-like movements such as walking, climbing the stairs and back flips. KHR-1 has a rechargeable battery and can be controlled with a RF remote control…



