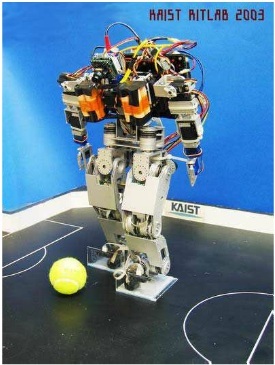
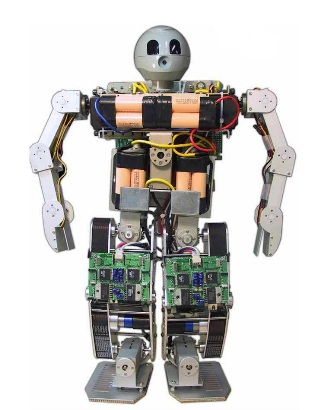
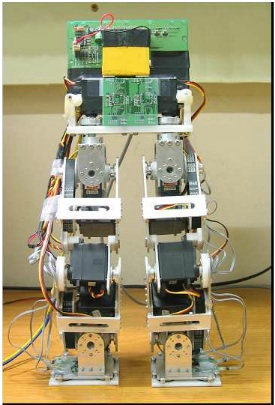
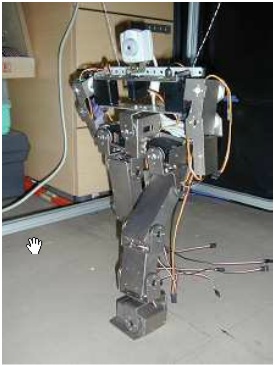
KAIST developed the sixth robot in the HanSaRam series called HanSaRam VI. It generates walking pace through 3D linear inverted pendulum mode, which makes easy to control motions.
HanSaRam VI
Copyright: RIT Lab.