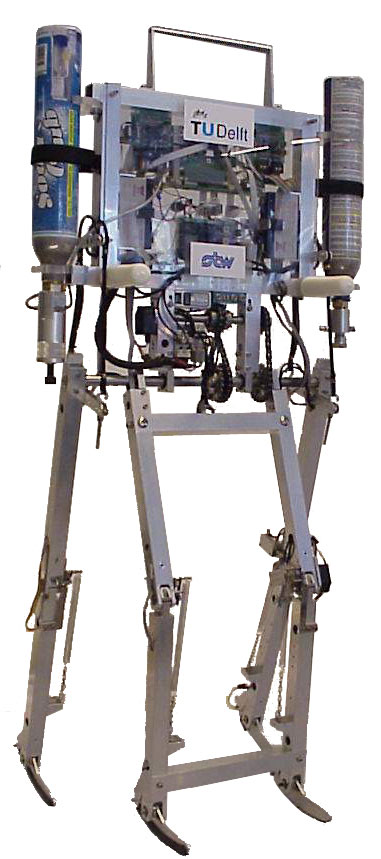
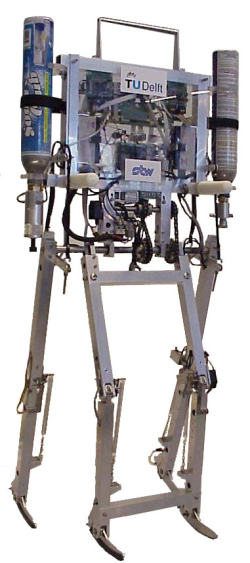
Max is a 2D robot built at the Delft University of Technology. The robot walks by only using an upper body, hip joints and knees. It makes use of McKibben muscles to offer minimal actuation for waling on a flat floor.
Max
Copyright: Delft Biorobotics Lab.