Greenman
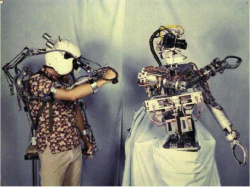
With five years spent on its development, from 1983 to 1988, Greenman is considered the first anthromorphic (human-configured) manipulator. SSC San Diego was at the helm of its creation and development. In its real essence, Greenman was a Remote Presence Demonstration System.
Greenman has arms developed by MB Associates, while its torso and head were developed by the SWAPAR Systems Center of SSC San Diego. It also has an exoskeletal master controller for use in the arms, torso, and head by the human controller.
Highlighting the vision system of Greenman is a 525-line vision camera for each eye, each of which has a 35 degrees field of view. Video camera eyepiece monitors were also mounted in the aviator’s helmet.
With Greenman on top of numerous tasks at SSC San Diego, superb experience in telepresence and teleoperation were taken into upgraded levels. There were also tasks that could be manipulated with it even without prior training by the controller.
Greenman was later added to the TOPS Project for implementation of hand dexterity and force feedback. This particular development was carried out by SSC San Diego with help from Sarcos, Inc.
Features: