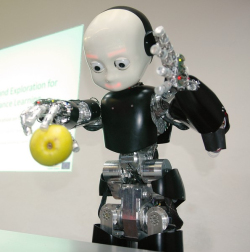
iCub is a humanoid robot designed by the RobotCub Consortium and several European research universities. It stands 1 meter high and has body dimension like a 3½ year old child.
The creation of iCub is based on the cognitive hypothesis of a human, especially babies, where it is controlled by an on-board PC104 controller using a CANBus actuators and sensors.
It is also equipped with Gigabit Ethernet with off-board software for external communication. iCub uses tendon driven joints for its hand and shoulder, with 53 actuated DOF - 7 in each arm; 9 in each hand; 6 in the head; 3 in the torso or waist; and 6 in each leg.
Features: