MARI III
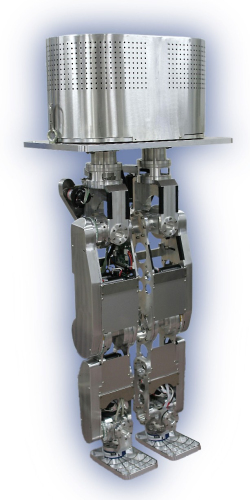
An autonomous fast walking and running bipedal robot was developed as part of the Mari series. Mari III, the third humanoid robot created by the Yokohama National University, has a mechanical structure as well as joint configuration and specification.
It is lightweight with a high output of 38 kilograms and 1.8 kilowatts respectively. Its body mechanism is built primarily with aluminium alloy, and it is equipped with gyro sensors, accelerometers, and six-axis force torque sensors.
Mari III is equipped with Robot Network (RON), a specific control system that is located in the fuselage. This control unit is a serial and distributed network that consists of a microcontroller, host units, servo units, and servo amplifiers. The development of Mari III implemented bipedal walking and one-leg jumping with time of 110 (ms), a verified experiment for fast walking and running.