PIGORASS
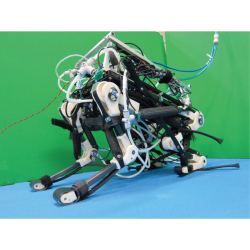
One of 2011’s most promising robotic animals was PIGORASS, a quadruped developed by Yasunori Yamada of the University of Tokyo with help from ISI Lab. This robot is capable of walking, jumping, and a sort of “galloping."
PIGORASS is capable of autonomous movement enabled by its simulated neural system. Due to this, the actions performed by the robotic animal are not necessarily programmed. It also boasts a set of pneumatic artificial muscles, passive muscles, pressure sensors, and potentiometers to propel it forward. The combinative functions of these parts allow real muscles to be simulated, resulting in more realistic movements.
Considering that Yamada is just a master’s student at the Graduate School of Information Science & Technology at the University of Tokyo, the advanced system he has put together in PIGORASS is amazing. The robotic animal was proudly presented at the IROS 2011 held in San Francisco. Other developers on the team are Satoshi Nishikawa, Kazuya Shida and Yasuo Kuniyoshi.
Features:


_001.jpg)


