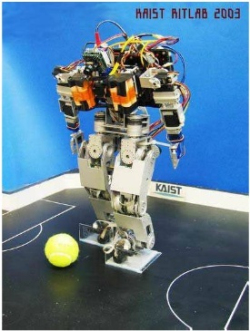
KAIST’s fifth robot in the HanSaRam series of bidepal robot was the HanSaRam V developed in 2003. It has a weight of 4.5kg and height of 45cm with a DOF of 28, 6 of which are located in the hip, knee, and ankle.
Its lower body consists of 12 DC motors, and 16 RC servomotors for its upper body. Used as a platform for FIRA soccer, the lower body is conceptualized for the sufficient torque and zero recoil.
HanSaRam V is equipped with all computational and power parts, RTLinux software, 6 infrared (IR) detectors, and 4 FSR on each foot sole.
Features: