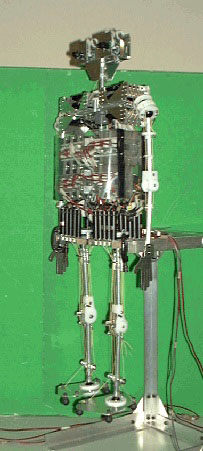
JSK laboratory of the University of Tokyo created a tendon driven robot prototype in 1999 called TH1, short for Tendon Driven Humanoid. This tendon driven robot is the predecessor of another humanoid robot they made two years later - the Kenta robot.
Just like its newer version, the TH1 robot has the capability of mimicking human-like natural movements. Its whole body motion is possible because of its flexible spine.
A few of the movements that this Japanese robot is capable of are: bending its torso, playing back directly what it was taught, tracking an object using its eye ball, neck and spine working in conjunction.
TH1 Features:


_001.jpg)


