June 05, 2013
At the Coordinated Robotics Lab. (UCSD) new image processing techniques have been developed for analyzing fires in buildings by robotic scouting vehicles.
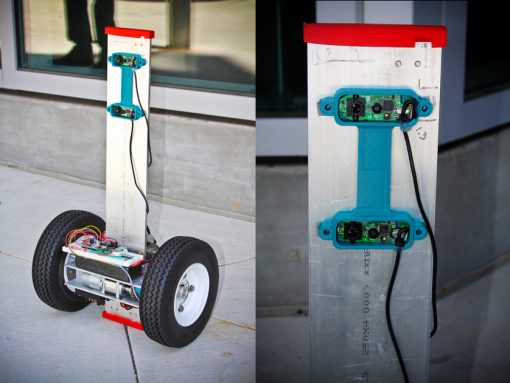
The new software uses the images taken by the robot's two stereo camera's to create a 3-Dimensional map and combines the thermal data recorded by its infrared camera. Together with other collected data like temperatures, the presence of gases and the status of the structural integrety of the building, it presents a complete virtual picture of the hazardous situation. In the meantime the robots keep scanning for survivors.
Firefighters and rescuers can use this information to analize the building structure and plan their firefighting and rescue actions.
The research is part of a project to develop small robotic scouting vehicles that can assist firefighters during fires in buildings. These Segway-like robotic vehicles will be designed to be small, inexpensive, autonomous and able to work together in groups to make the fire exploration more efficient and fast.
Apart from the Coordinated Robotics Lab. , which is part of the University of California, San Diego, this project is also a collaboration between researchers from the Jacobs School of Engineering, the University of Illinois at Urbana-Champaign, the San Diego Fire & Rescue Department, and a number of local corporate partners.
Source: UCSD Jacobs School of Engineering