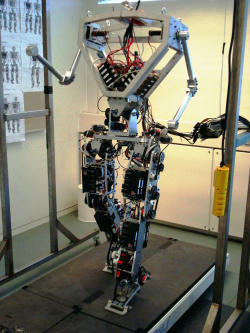
AAU-BOT1
A special mark was made in 2006 for Aalborg University of Denmark, when the AAUBOT group was founded. Its aim was to build a robot that was fully implemented by the university’s students. The realization of this dream was a long journey that stretched to 2010, when the AAU-BOT1 was released with several improvements since its beginning in 2006.
AAU-BOT1 was first worked on by a student group from Aalborg University’s Department of Mechanics (IME). In 2007, a group from the university’s Department of Electronics and Systems (ES) took over to assemble the humanoid robot. This group designed the first control platform, solely based on a bus structure with a model completely set up for use in simulation where control structures were implemented.
In 2008, another group from ES took over and improved on the data platform. They were ready to make AAU-BOT1 walk statically in June, 2009; however, several delays and problems were encountered by the students.
A new group took over and worked towards the overall improvement of AAU-BOT1, resulting in better data logging and mechanical design. The humanoid robot underwent other developments in 2010, all of which were supported by parameter findings.
Features: