ChibiDragon
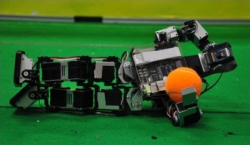
In 2009, Thailand’s prestigious Chulalongkorn University created a humanoid robot, which the developers named ChibiDragon. It was entered into RoboCup 2010.
ChibiDragon has advanced hardware within its system. It was built based on Kondo KHR-1 HV. A total of 20 servos were used, along with accelerometers, gyroscopes, an ARM9 computing board, and RCB3 servo controller.
Its vision system was highlighted with a CMOS camera mounted on its neck. Interpreting the string of commands coded under C++, ChibiDragon is able to move to a certain point, get a ball and shoot it. It is also capable of walking, turning, kicking, and stable side-stepping.
Features: