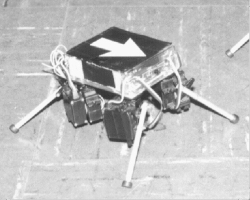
In 1994, a Japanese company, JSK Laboratory in the University of Tokyo, designed and created a robot that had to be as small as possible - the Chibita. This small, remote-brained robot was designed in a way that it had to be on its four legs walking at all times and in all circumstances.
Despite lacking any sensors, this four-legged robot can still walk even if it topples over or accidentally turns over. This is possible by the turning or rotating of its entire body in order to go back to its original state. This capability is the Chibita’s distinct feature.
Features:


_001.jpg)


