Denise
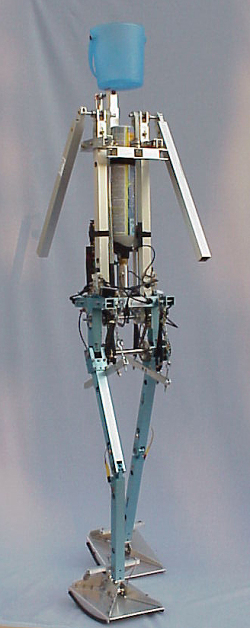
Denise is the last pneumatically powered walking robot of the Delft Biorobotics Lab. Denise has a human configuration, which means it has two legs, two knees, an upper body, and two arms that can counter swing.
This 3D robot uses the McKibben muscles, resulting in lower motion when it walks on a flat surface. It also has two ankles to stabilize it when walking. The knees of this robot bend and extend, acting as a passive pendulum. Sensors are attached at its foot, which switch when the foot lands. When one foot lands, the opposite knee is released and the muscles at its hip are pulled forward.
Tu Delft’s goal in developing this robot is to show that the concept of passive dynamic walking can be used to make a highly efficient and natural looking biped robot.
Features: