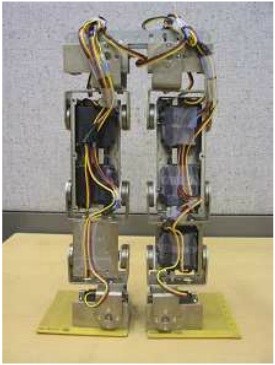
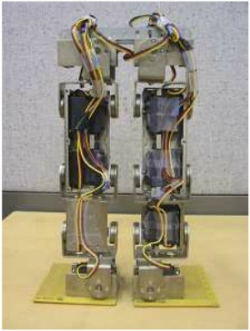
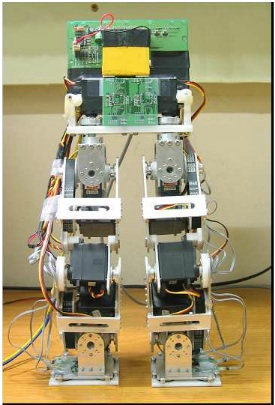
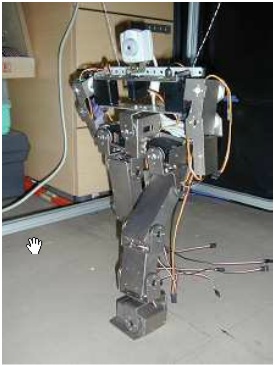
KAIST developed the first robot in the HanSaRam series called HanSaRam I. This bipedal robot was created to test the walking algorithm and control method of lightweight robots.
HanSaRam I
Copyright: RIT Lab.