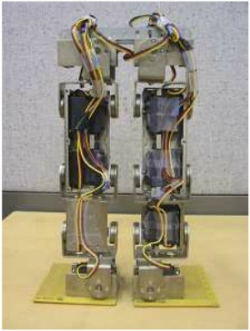
HanSaRam I is the first bipedal walking robot in the series developed by KAIST (Korea Advanced Institute of Science and Technology) in 2000. It was created to test the walking algorithm and control method of lightweight robots, and to participate in FIRA Cup, one of the two major robotic soccer leagues.
Although it was built with 10 RC servomotors, its creation lacked of torque for appropriate body walking, degree of freedom in its lower body for turning motion, and sensor feedback as well.
Features: