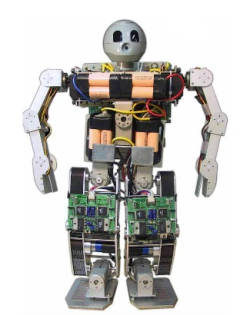
KAIST developed the third robot in the HanSaRam series, the HanSaRam III. It was completed in 2001 with 12 DC motors and 10 RC servo motors.
Unlike the first two robots in the series, HanSaRam III has 22 DOF - 12 for the lower body and 10 for the upper body.
The servomotors are put together to copy a human body; however, it was not equipped with a sensor feedback system.
Features: