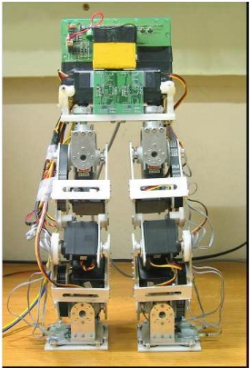
In 2002, Korea Advanced Institute of Science and Technology (KAIST) created the fourth robot in the HanSaRam series, the HanSaRam IV. It was built to test the ZMP stability from the sensor feedback mechanism which the HanSaRam III lacked.
The fourth robot consists of 12 servomotors, with each foot equipped with 4 force sensing resistors (FSR). It is also armed with two micro-controllers - the master controller used for sensor interface communication, and the slave controllers used to control the RC servomotors.
Features: