Pronounced as hai-kiu, the HyQ robot was developed by the Department of Advanced Robotics at the Italian Institute of Technology (IIT). This robot is a fully torque-controlled Hydraulic Actuated Quadruped robot, hence its name. It was designed to navigate difficult and rough terrains, and still do highly dynamic task like jumping and running with various gaits.
The objectives of The Italian Robotic Institution during the course of this project were to investigate the different characteristics like quadrupedal locomotion, adjustable compliance, energy efficiency and compact hydraulic actuation. Additionally, IIT wants to investigate the aspect of having an onboard power system on this quadruped robot.
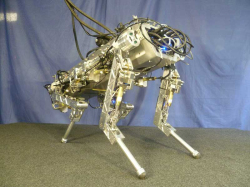
The HyQ robot measures 1.0mx0.5mx0.98m and weighs a bulky 70 kilograms. Despite its humongous size and weight, it can still kick and trot, run, hop, and walk. All of this is made possible by its actuators that absorb the shocks and vibrations without damaging its body. Also, this robot can look like a big crawling insect, can rear like a horse and can also kick like one.
The HyQ quadruped robot has 12 Degrees of Freedom.
HyQ Features: