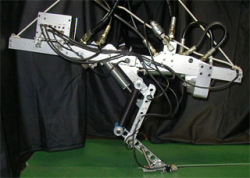
Tokyo Institute of Technology, a Japanese institution, created a biologically inspired one-legged hopping robot called the KENKEN robot. This robot utilizes the hind limb of a dog as its model.
The Kenken robot has an articulated leg that uses two hydraulic actuators for its muscles. It also has a tensile spring that acts as its tendon. This spring, which is attached like a bi-articular muscle, allows the robot to produce propulsive force through energy transfer from its knee.
Although there are no actuators at the ankle joints, it is still able to succeed in planar one-legged hopping. This is because it has empirical controller that is based on the characteristic dynamics of its model.
Additionally, its tendon stores kinetic energy and turns it into potential energy at rest. This also absorbs the impulse while landing which is important in running and/or jumping movements.
KENKEN Features:

_001.jpg)

