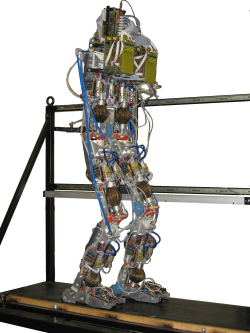
Robotics and Multibody Mechanics Research Group of the Department of Mechanical Engineering in Vrije Universiteit Brussel researched on computer-aided analysis of rigid and flexible mechanical systems. It was focused on kinematical and dynamical simulations, and on the development of new actuators. The research yielded a bipedal robot named LUCY.
This lightweight bipedal robot is able to walk in a more dynamic and stable way. The configuration made on LUCY is anthropomorphic that concentrates more on the lower walking part, which is made of two articulated legs. Because of its one-dimensional joints, the robot can move only in the sagittal plan.
The joints are also powered by an antagonistic pair of pleated pneumatic artificial muscles. These muscles work on low pressures and can be paired without any intricate gearing apparatus. Lucy weighs about 30 Kg and stands at 150cm.
LUCY Features: