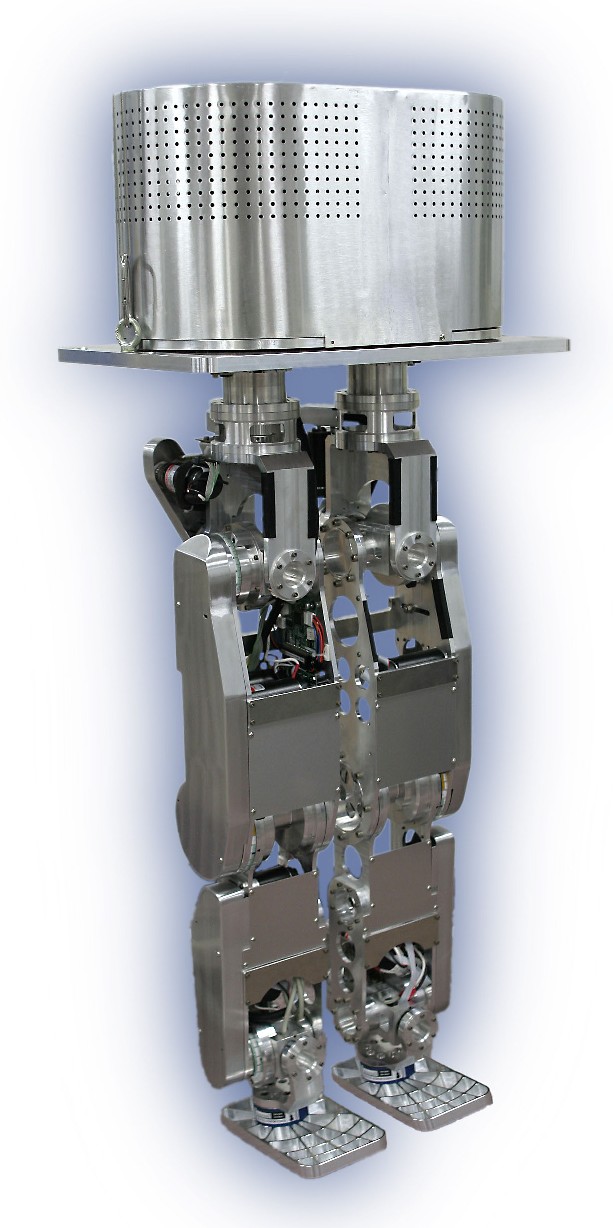
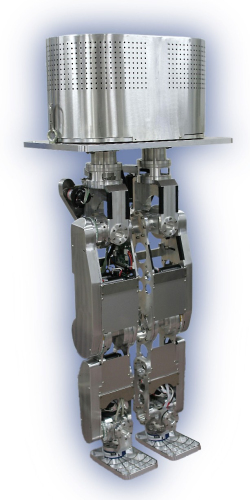
The third humanoid robot in the Mari series, the Mari III, is equipped with the Robot Network (RON) control system. Its body mechanism is built primarily with aluminium alloy, and it also has gyro sensors and accelerometers. The development of Mari III applied bipedal walking and one-leg jumping with time of 110 (ms), a verified experiment for fast walking and running.