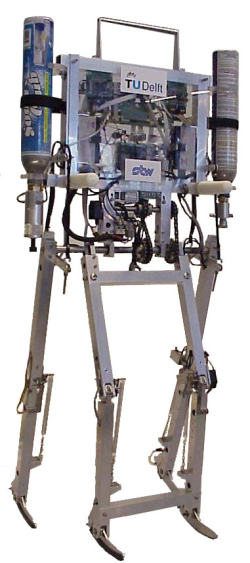
Built at the Delft University of Technology in the summer of 2003, Max is a 2D robot that walks by only using an upper body, hipjoints and knees. The robot makes use of McKibben muscles to offer minimal actuation for waling on a flat floor.