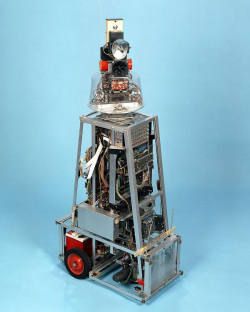
Bart Everett created one of the very first behaviour-based autonomous robots for his thesis project while attending at the Naval Post Graduate School in Monterey, California. This wheeled robot, which he created and formed as one of Systems Center Pacific’s robots, was called the Robart I.
Robart I contains a layered hierarchy of behaviours, allowing it to avoid any obstacles and respond to impacts. Created to patrol in a home environment, Robart I follows either a random or a preset pattern moving from room to room to check for any unwanted conditions like fire, smoke, break-ins, etc.
When it is low on power, it automatically recharges itself at a freestanding recharging station. Most of the time this security robot remains idle, and acts in random intervals to conserve its energy.
Besides patrolling, Robart I is capable of finding its way back to the station. When it hits an obstacle, it is able to go back and realign itself before continuing its task.
Robart I Features: