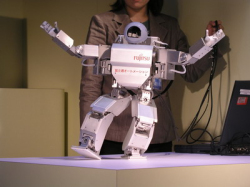
HOAP 2 is the second robot in the Fujitsu series of humanoid robot platforms. Developed in 2004, it has a weight of 7kg, a height of 50cm and contains 25 DOF.
Fujitsu created HOAP 2 with RT Linux as its Operating System which can also be connected through a USB interface. Its internal Local Area Network (LAN) is also modified for the addition of new actuators and sensors.
HOAP 2 is also equipped with new software known as the Humanoid Movement-Generation System which enables the humanoid robot to learn a wide range of movements.
The Central Pattern Generator (CPG) and the Numerical Perturbation Method (NP) are the neural networks developed in HOAP 2.
Features: