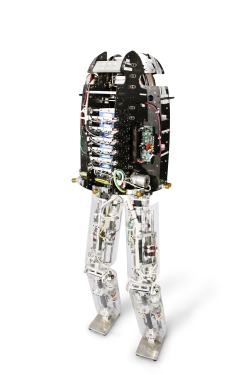
An American robotic firm, Florida Institute for Human and Machine Cognition, created a lower body humanoid robot called the IHMC Biped robot. This robot possesses 12 degrees of freedom.
In order to achieve high fidelity force at each joint, the IHMC Biped is equipped with force controllable Series Elastic Actuators. Its orientation and height is controlled by a Virtual Model Control. Its speed can be manipulated through center pressure on its support feet and by the foot placement.
The IHMC Biped is capable of balancing itself when pushed a little and can also balance itself using one leg. Currently this humanoid robot is capable of walking at a slower pace, and can compensate for various disturbances that may affect its walking capabilities.
IHMC Features: