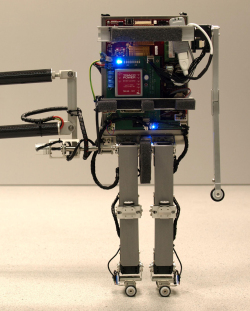
Being a prototype robot built by the Delft University of Technology, Leo is particularly built for machine learning tests for humanoid robots. The boom construction of this 2D robot keeps the hip axis horizontal and provides power to make sure the learning experiments are lengthy. Moreover, the boom construction enables the robot to walk in circles. Leo has improved its walking gait with the help of reinforcement learning that shapes behavior by punishing failure and rewarding success.
Leo is a fully autonomous walking robot and its computing is performed on-board making use of a single board computer with 1GB of RAM and 1.2GHz VIA processor. The robot consists of 7 joints – 1 in the shoulder and 3 in each leg- that are produced by Dynamixel RX-28 servo motors.
Sometimes, the learning process causes Leo to act clumpy, making the robot potentially destructive to itself. Due to the learning algorithm of Leo, its gears fail very fast at the time of the initial learning stage. The learning algorithm creates tremors resulting in high loads in the gear teeth. However, adapting the leaning algorithm can sometimes reduce or prevent these loads.