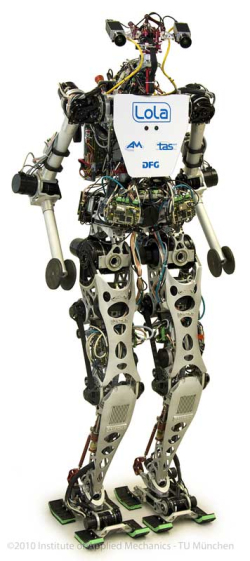
Lola is a humanoid developed by the Technical University of Munich in collaboration with the Institute of Technology Autonomous Systems. It is1.8 meters tall and weighs 60 kilograms, and has 25 degrees of freedom; 7 in each leg, 2 in each arm with three joints, and the others in the pelvic segment.
Lola is equipped with 2 pairs of 5 MP cameras. Its mechanical structure is characterized by redundant kinematic composition, the use of lightweight construction and modular, multi-sensory joints based on servo motors.
It also has an on board computer, several remote control modules, and a smart sensor-actuator. Lola is equipped with a QNX Neutrino real-time operating system which is implemented in C/C++ cooperating processes. However, to monitor Lola’s system status, an external PC is needed.
Features: