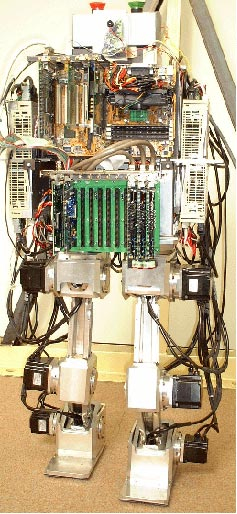
Mari II
Mari II is the second in the humanoid series being developed by the Yokohama National University. This robot is based on the perception of visual walking where a controlled algorithm is presented and verified by various experiments. The theory is reached by installing a hybrid camera control, where the image is featured by a posture control and by tracking the bipedal walking.
Maru II is 130 centimeters tall and weighs 70 kilograms. It has a total of 12 degrees of freedom (six for each leg), and works on 12 AC servo motors with encoders. The robot’s development is focused on stable walking with on-line ZMP control and adaptive motion with visual feedback.