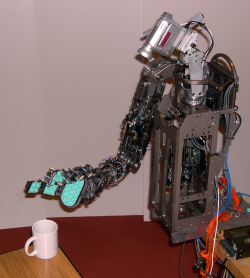
Boston based MIT CSAIL created a humanoid robot called the Obrero. It is specialized in sensitive manipulation. According to its developers, this robot is responsive to the properties of the object it is handling. It does not rely only on its vision, but uses as a complement.
The hand of Obrero is compliant and has position and force control in its fingers. Its fingers are also equipped with sensitive tactile sensors, with each finger having a series of elastic actuators.
Although its fingers have two mechanically coupled links, they can be decoupled to conform to the shape of the object it is manipulating.
Obrero Features: