 Picture: Massachusetts Inst. of Tech. (MIT)
Picture: Massachusetts Inst. of Tech. (MIT)
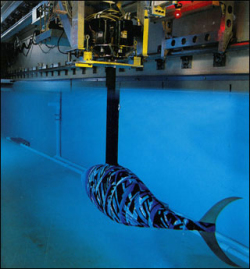
RoboTuna I was the very first functional robotic fish ever developed and created. To earn a PhD degree, David Barrett, the designer, created this robotic fish back in 1995 as part of his PhD thesis at MIT.
Designed to copy the shape and movement of a real tuna fish, this robot is controlled by six powerful servomotors. Barrett performed several tests on the robot to assess the swimming capabilities of the fish.
The original goal of this project was the development of a better propulsion system for Autonomous Underwater Vehicles, or AUV.
Features:





