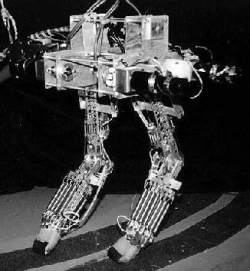
The Spring Turkey is a planar bipedal walking robot designed and built by Peter Dilworth and Jerry Pratt at MIT. The two made this robot with an actuated hip and knee on each leg. A boom, which is un-actuated, prevents roll and lateral movement, making it into a 2D robot.
Linear springs are installed at the hips and knees of the robot to apply series elastic actuation, while a rotary potentiometer is used to measure how far its hip springs stretch, and another is used to measure springs found at its knees. Power is transmitted to its joints from its upper body through cable drives.
The Spring Turkey robot was developed as an experimental platform waiting to be implemented. This robot was retired in January of 1996, because of some mechanical issues. This is said to be the predecessor of their Spring Flamingo, which is deemed more reliable mechanically and equipped with better feet and ankles, making it more sophisticated.
Features: