 Picture: Katsuhisa Ito’s Silf H1 Webpage
Picture: Katsuhisa Ito’s Silf H1 Webpage
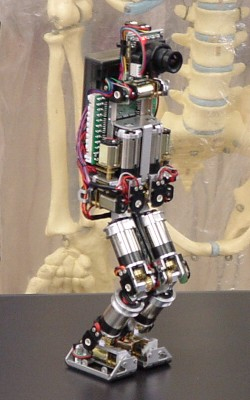
Silf H1 was born out of passion of its creator in robots and humanoids. Its creator, Katsuhisa Ito, started working on this bipedal humanoid in 1998. Silf H1 was deprived of arms due to lack of funds. Thus, it only worked with 14 degrees of freedom (DOF), with six in each leg and two in its head. Despite shortage of financial sources, Ito still managed to pursue Silf H1. On November 10, 1999, the humanoid got completed and started walking seven days later.
Silf H1 qualified for the expert league of the 20th All-Japan Micro Mouse Tournament, where it reaped the admiration of judges and spectators. It succeeded in taking home the humanoid leg of the competition, and a year later in 2000 Silf H1 saw itself impressing attendees of the RoboCup Japan where it won the Robotics Society Award.
Although Silf H1 was an incomplete masterpiece, it is still proud for having a head containing a CMOS camera on which it relies for its vision and sensory capabilities. This humanoid weighs 430 g with its battery on and stands at 22.5 cm.
Features of Silf H1:
