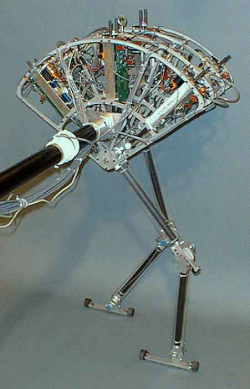
It was Jerry Pratt who designed, built, and controlled a robot called Spring Flamingo. It has an actuated hip, knee, and ankle on each leg. The Spring Flamingo’s actuators were based on Mike Wittig’s design and prototype, which he made as part of his undergraduate thesis at the Massachusetts Institute of Technology (MIT) back in 1995.
Several other personalities were involved in this undertaking. Among them was Robert Ringrose, who was responsible for developing the software that was a modified version of his own personal creature collections and some simulation software. Another is Dave Robinson, who designed the foot, the machining, and gave advice on the design itself. Dan Paluska helped them in the assembly. To thank for the machining and naming of the robot, because of its peculiar appearance, is Ann Torres. (The robot doesn't move or act like a flamingo, nor did its developers intend it to.)
The legs of this robot, which used to have passive swing leg features, were turned around, and as a result, MIT managed to come up with algorithms which utilize the natural dynamics of the Spring Flamingo. MIT then added a bent-forward knee to arrest these passive movements, making this robot’s movement human-like.
Features: