Back in 2006, DARPA funded a research conducted by the Florida Institute for Human and Machine Cognition or IHMC to develop a dynamically stable robot called Tbot. Tim Hutcheson, Jerry Pratt, Victor Ragusila, Shervin Emami, Peter Neuhaus, Chris Wilmer, Ryan Chilton, John Carff and John Rebula were all responsible in making this robot a reality.
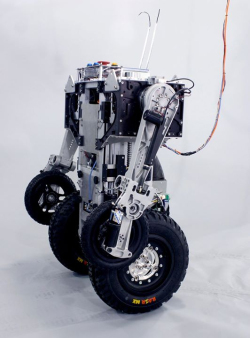
The goal of IHMC was to make a robot that is capable of transporting objects quickly in an open area. When in a tight urban combat scene, it can do precise operations. Its arms are equipped with an extra set of wheels and it has a linear waist actuator. Additionally, this wheeled robot can transform from a four-wheeled statically stable formation to a two-wheeled dynamically stable setup.
DARPA requested them to test various prototypes of robot soldiers that could replace American human soldiers in Iraq and Afghanistan. Back then, bulky tanks were having a hard time navigating the narrow streets and going inside buildings. With the TBot’s ability to change from a remote controlled four-wheeled to a two-wheeled vehicle robot, this technology was considered to be better. The TBot can move well, navigate different terrains, can climb stairs and survive large fall from height.
TBot Features: