As part of NASA’s Goddard Space Flight Center’s quest for an Autonomous NanoTechnology Swarms (ANTS) research project, scientist at this institution developed a robot to explore distant rugged terrain. The TetWalker was developed to traverse far and uneven landscapes. Instead of driving or walking like any ordinary hover, this robot changes its shape and tumbles along, using its center of gravity, while exploring its surrounding environment.
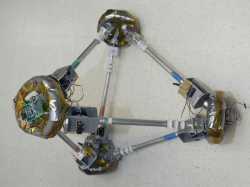
This robot has an adjustable frame, which is attached together at key points or nodes. A thin bar connects to the round nodes forming into a tetrahedral shape. It is also connected to another payload node found in the middle, to hold the computer systems and its sensors.
The TetWalker can move by either extending or contracting its struts, depending on the configuration and shifting of its center of gravity. The movement continues until it tumbles over, and the whole process starts all over again.
This robot is capable of changing its shape from a tetrahedral to cubic, from a nearly spherical shape up to a point that it looks like a pancake, depending on the surface that it explores. With the technology that NASA is installing in the TetWalker, they hope that this robot can eventually steer itself even in crevasses and negotiate steep surfaces by shifting when it is deemed necessary.
Features: