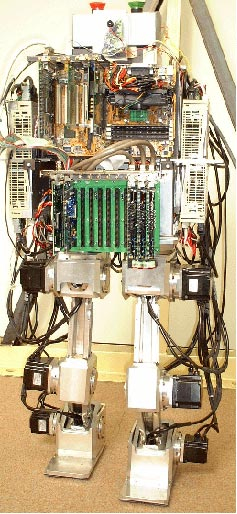
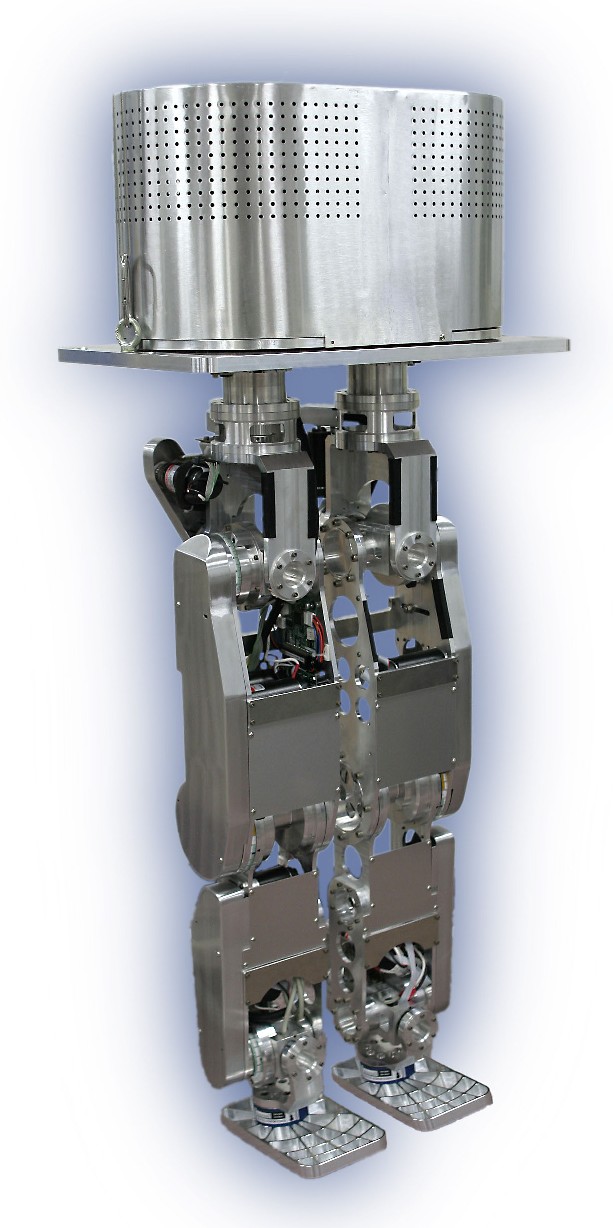
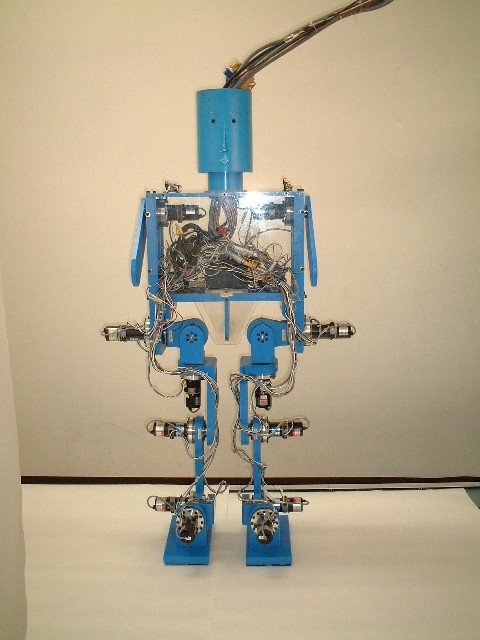
The second robot in the Mari series, the Mari II, is based on the perception of visual walking where a controlled algorithm is presented and verified by various experiments. It has 12 degrees of freedom and works on 12 AC servo motors with encoders. The robot’s development is focused on stable walking with on-line ZMP control and adaptive motion.